Mori3:用於太空旅行的多邊形變形機器人
2025/11/3 晚上9:08
來自瑞士 École Polytechnique Fédérale de Lausanne(EPFL)機器人研究團隊發表了全球其中一款最先被提出、針對變形任務環境設計的機器人——Mori3。這款機器人雖還未為一般家庭使用所設計,但它代表「模組化、變形機器人」走向實用化的重要一步。
一、從實驗室走向太空/探索場景的「機器人模組化隊伍」
Mori3 的設計理念,是把「多邊形網格(polygon meshing)」的數位概念,以及「模組群體協作」的生物啟發,融合成機器人系統。
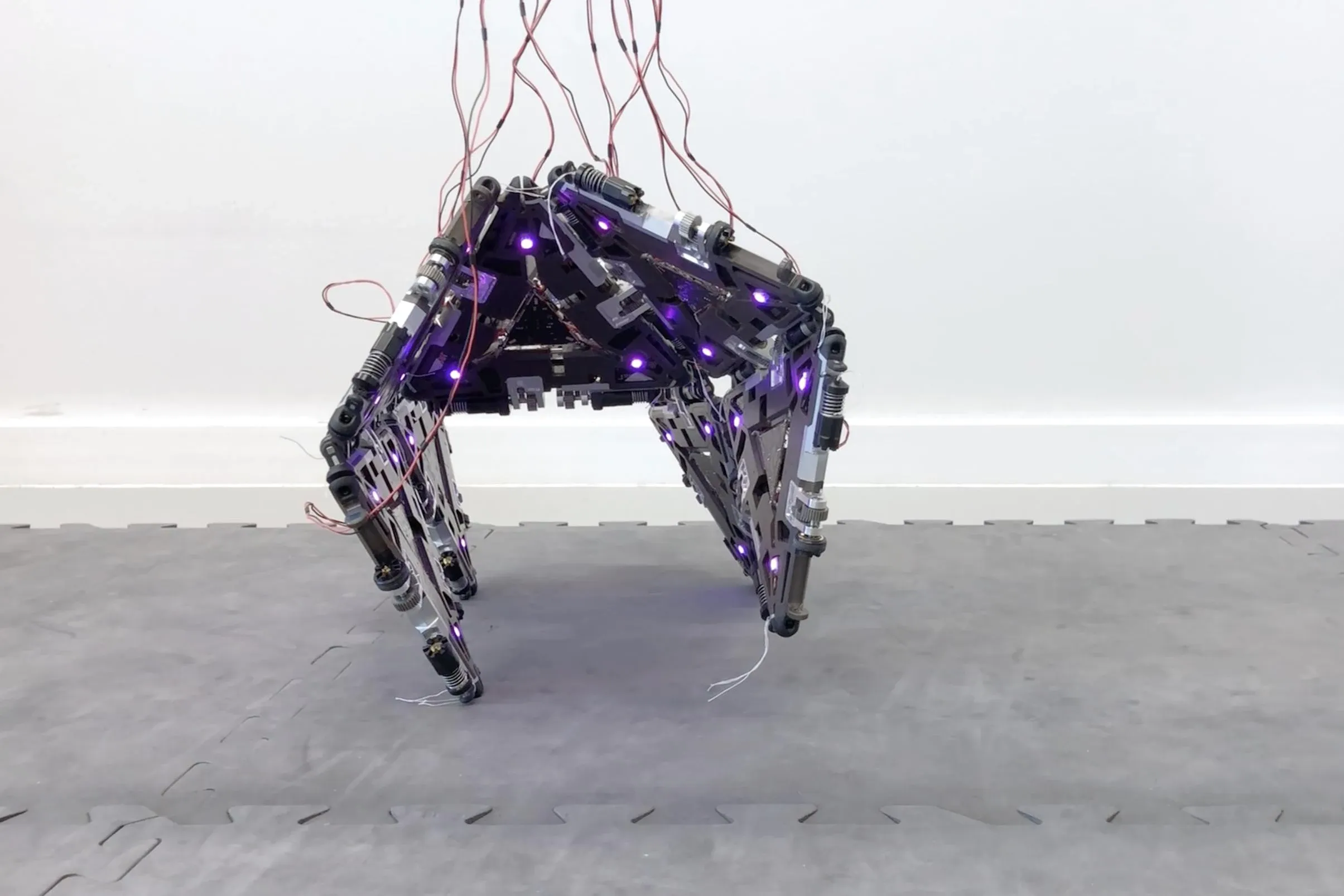
具體來說: 每個模組為三角形,具備連接、通訊、重構能力。 這些模組可以像拼圖般連結、拆解,從 2D 三角形構型變形為各式 3D 結構(例如平台、機械臂、移動構體)—即「物理多邊形網格化(physical polygon meshing)」。
研究團隊指出:「Our aim with Mori3 is to create a modular, origami-like robot that can be assembled and disassembled at will depending on the environment and task at hand. Mori3 can change its size, shape and function.」
二、設計與運作機制
模組結構與連接機制 模組三角形外型,設計上便於多方向連結與彎折。 在「多邊形網格化」過程中,模組不僅組成靜態結構,也可動態變形與移動。 團隊指出,為了讓模組具備動作、連接、通訊、自主重構能力,機械、電子、控制系統都需突破傳統設計。
功能能力(現階段)根據研究與新聞稿內容,Mori3 已展示以下能力:
- 移動:模組重構成構體後能自主運動。
- 拿取/搬運:模組組合可形成臂/構造以操作物體。
- 與使用者互動/構型變化:系統可以在多種構型間迅速切換以適應任務。
為何適合太空與探索環境 在太空或外太空探索任務中,體積與質量都非常受限。若每一任務都需特定機器人,則不切實際。Mori3 的模組化變形設計,正好回應此需求。 模組可被打包攜帶,抵達後在目的地重構成不同形態,用於維修、搭建、探測等。
三、應用場景(聚焦探索/太空任務)
- 太空船或軌道站外部維修/組裝:Mori3 模組可變形成工具、支架、作業平台,於狹窄或複雜環境中工作。
- 通信基礎設施或臨時構築體:在月球、火星或其他天體上,模組化結構可重構為通訊平台、探測基座。
- 未知地形/多任務適應:探測地形多樣、環境不確定。Mori3 可根據任務需求與形態變化適應不同挑戰。
四、目前限制與研究挑戰
雖然為概念驗證(proof-of-concept),但尚未進入商用或大量任務部署階段。
作為通用平台,在某些專門任務上,其效率可能仍低於專用機器人。研究團隊亦明言:「Of course, a general-purpose robot like Mori3 will be less effective than specialized robots in certain areas.」
技術挑戰包含模組連接的穩定性、電源/通訊在模組間分配、控制系統對變形構型的適應、極端環境(如太空、真空、強輻射)下的可靠性。
在公開資訊中,尚 未 見明確資料指出 Mori3 已具備「摺衣服」、「開門」、「對話互動」等家用機器人級別功能。此為未來願景,而非已實現功能。
五、參考與研究資料
研究論文:Belke, C.H., Holdcroft, K., Sigrist, A. et al. “Morphological flexibility in robotic systems through physical polygon meshing.” Nature Machine Intelligence, 5, 669–675 (2023).
新聞稿/技術報導:EPFL 官方新聞稿 “Mori3: A Polygon Shapeshifting Robot for Space Travel” (2023年6月12日)
技術普及文章:TechExplorist “Groundbreaking polygon shape-changing robot for space exploration” (2023年9月)
部分內容使用Gemini、ChatGPT,可能會提供不準確的資訊,請檢查資訊正確性,並謹慎接受訊息。
0 則留言